
1987: Проведена первая хирургическая операция с использованием робота
История роботизированной хирургии началась в 1985 г. с появлением робота PUMA-560. Аббревиатура PUMA расшифровывается как Programmable Universal Machine for Assembly или Programmable Universal Manipulation Arm — программируемая универсальная машина для сборки или программируемая универсальная рука-манипулятор.
История роботизированной хирургии началась в 1985 г. с появлением робота PUMA-560. Аббревиатура PUMA расшифровывается как Programmable Universal Machine for Assembly или Programmable Universal Manipulation Arm — программируемая универсальная машина для сборки или программируемая универсальная рука-манипулятор.
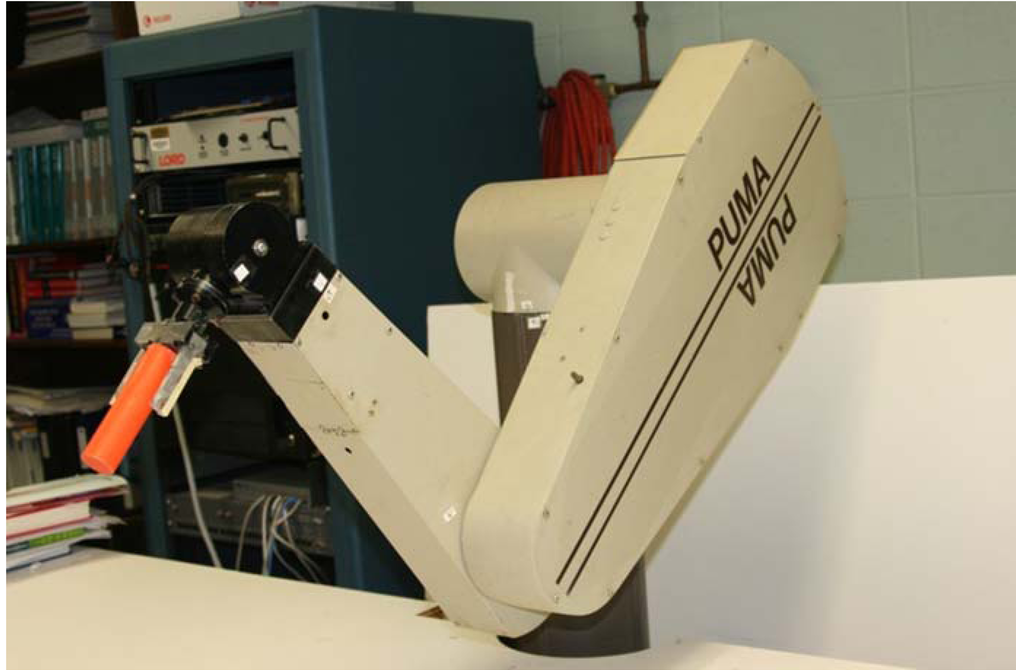
Манипулятор робота PUMA-560 обладал шестью степенями свободы, что позволило опробовать его в медицинских целях — для проведения биопсий головного мозга. Использование манипулятора робота вместо рук хирурга позволило избежать проблемы естественного тремора — «рука» робота-хирурга не начала бы дрожать даже после 10-часовой операции. Однако в лечебных целях PUMA-560 не использовался — он применялся только для диагностики.
Первая диагностическая операция была проведена при помощи именно такого робота
Первой же хирургической операцией, проведённой с помощью робота, считается лапаротомическая холецистэктомия (удаление желчного пузыря через прокол). Она была проведена в 1987 г. Для операции доктор Фил Грин (Phil Green) из Стэнфордского исследовательского института (SRI International, до 1977 г. — Stanford Research Institute) и армейский хирург доктор Джон Бауэрсокс (John Bowersox) разработали так называемую «хирургическую систему телеприсутствия» (telepresence surgery system). Впоследствии некоторые решения, появившиеся в ходе создания этой системы, были использованы при разработке знаменитого робота-хирурга da Vinci.
Первые экспериментальные операции по удалению простаты при помощи роботизированной хирургии врачи начали проводить в 1988 г. Несколько позже роботы начали использоваться в ортопедии — система RoboDoc «ассистировала» врачам в операциях по замене крупных суставов. Позже арсенал хирургов пополнился ещё несколькими подобными устройствами, но все они имели узкую специализацию, а значит, каждое из них можно было использовать только для проведения ограниченного числа конкретных вмешательств. Автоматическая система оптимального позиционирования камеры AESOP (Automated Endoscopic System for Optimal Positioning), выпущенная в 1993 г., могла использоваться у пациентов разного профиля, но она представляла собой скорее надёжного ассистента, способного удерживать камеру в нужном положении на протяжении всей операции. Коренным образом ситуация изменилась только в 2000 г., после широкого распространения робота-хирурга da Vinci, избавившего врачей от необходимости стоять у хирургического стола. Четыре «руки» Da Vinci проводили все требуемые манипуляции, а хирург в это время мог находиться в другой комнате — перед специальной управляющей консолью.
Использование манипуляторов робота вместо рук хирурга позволило уменьшить травматичность многих хирургических операций и сократить период восстановления пациентов. Так как операции с применением роботов проводятся через небольшой прокол, швы выглядят аккуратнее. И, наконец, что немаловажно, риск передачи инфекции от пациента к хирургу (или наоборот) в случае с использованием «рук-манипуляторов» равен нулю.
Благодаря этим преимуществам, роботизированная хирургия постепенно стала общепринятой клинической практикой — только за 2012 г. «при участии» робота-хирурга da Vinci в мире было проведено около 200 тыс. операций.
Ссылка на оригинал: https://22century.ru